-
Schémas

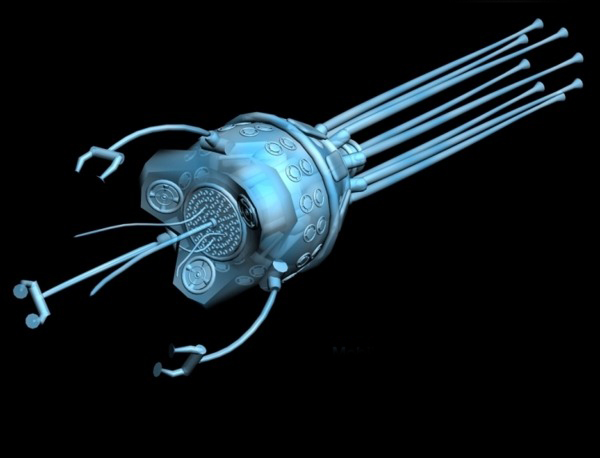
Diamondoïde cellule de réparation nanorobots
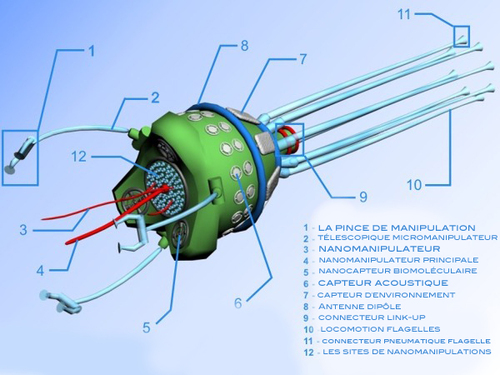
Détails des composants:
1- Entièrement programmable, les pinces de manipulation manipulent une grande variété de cellules dans des orientations et des environnements divers par différents mode de saisie.
2-un dispositif permettant de déplacer un objet.
3 et 4-Un dispositif de balayage optique, une interface d'ordinateur et un manipulateur physique.
5-Un dispositif qui consiste à la capture de molécules chargées.
6-Des capteurs qui convertissent le signal des ondes sonores en signal électrique.
7-Des capteurs qui détectent les bactéries et l’environnement ou se situe le nanorobot.
8-Deux antennes destinées à transmettre ou recevoir de l'énergie électromagnétique.
9-Connecteur a très Haut-Débit de transfèret ainsi que de recharge.
10-Dispositif qui permet au nanorobot de se déplacer .
11-Enbout des flagelles gonfler a l'air pour plus de rapidité
12-Site qui permet de traiter ou d'éliminer les mauvaises cellules.
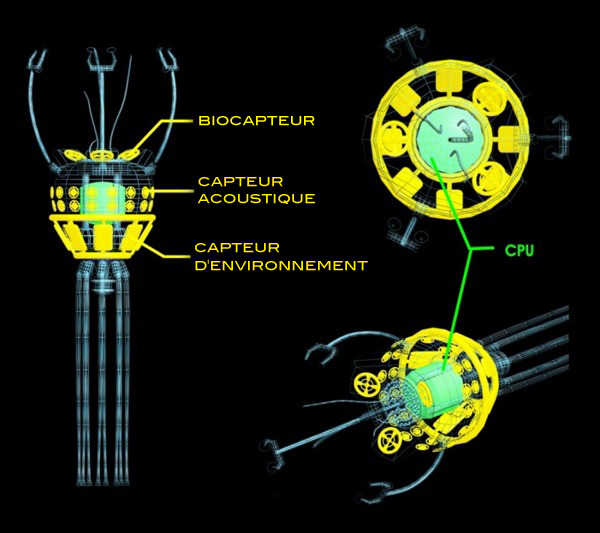
 Ancre et la locomotion sous-système
Ancre et la locomotion sous-système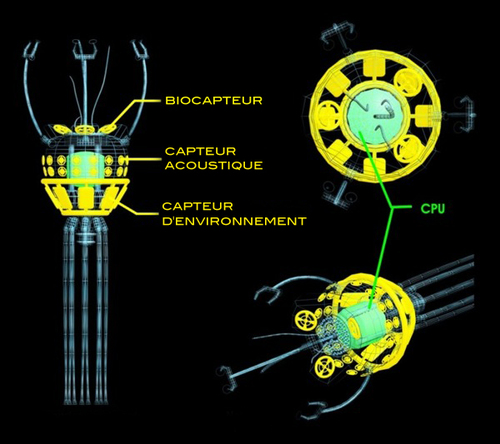
Capteur et le processeur sous-système

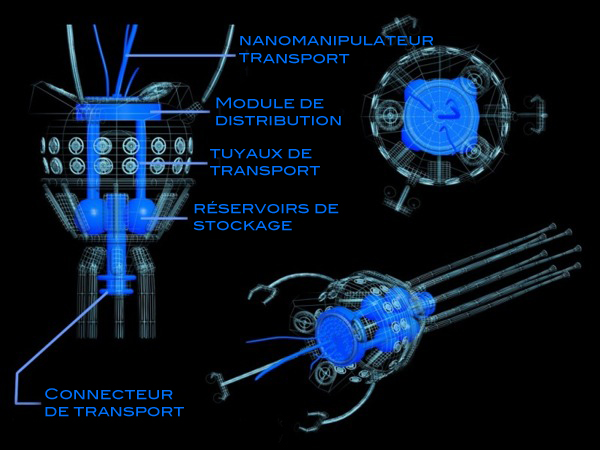
Sous-système de transport
Les schémas ci présents se sont des schémas montrant les différents compartiments en détail des nanorobots.


|
|
|
|